Let’s just say that people who state this are those that don’t know me very well.
“Oh, you’d make a great dad” people tell me.
No.
No I wouldn’t.
I’d make a lousy father. I don’t like sharing my toys and I am pretty sure I’d hide all my chocolate bars from my kids.
I reflect on the terrible things I did to my own father’s tools in his workshop. I was like the gremlin that made tools and parts disappear off the bench when you weren’t looking and when they did reappear, they were never in the place you’d expect them.
Over the years I’ve figured out that the world neatly divides in to two groups. Those who are parents or want to be parents, and those that aren’t and don’t ever want to be.
“No, I cannot just ‘close it back up in the packaging.'”
People, parents usually, get quite vitriolic when I state that children of any age are unwelcome in my home, and unsupervised children even less so.
I have a nervous tic whenever a hint of children showing up surfaces ever since “The Great LEGO Unboxing of ’05”
For those that aren’t parents, I don’t need to explain it. And for those that are parents, I probably cannot ever explain it.







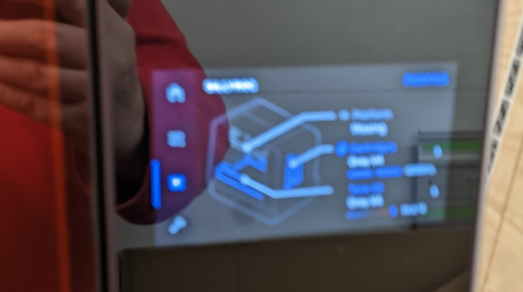
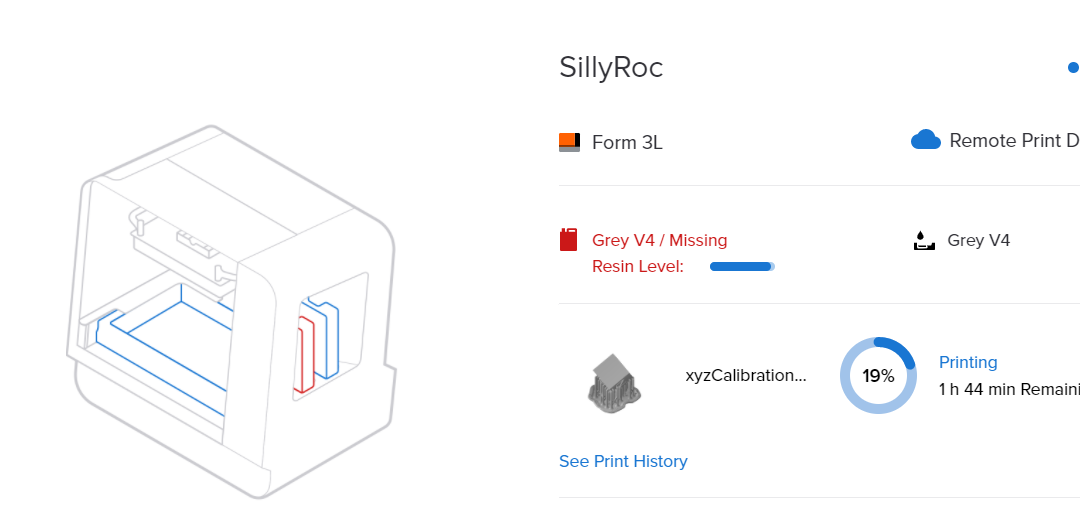 My dashboard shows that the build platform is not installed. And the printer also indicates that the build platform is not installed. Or rather, the graphic image, and the accompanying text, shows a lack of build platform, but the printer must believe the build platform is there, because if it wasn’t the printer wouldn’t print. The build platform is physically there and fully secured. And I have reseated it and locked it down twice.
My dashboard shows that the build platform is not installed. And the printer also indicates that the build platform is not installed. Or rather, the graphic image, and the accompanying text, shows a lack of build platform, but the printer must believe the build platform is there, because if it wasn’t the printer wouldn’t print. The build platform is physically there and fully secured. And I have reseated it and locked it down twice.